
Previously, I had shown how I designed a turret to keep cats from using our backyard as a litterbox in another house. I got as far as tracking people and ended up leaving it at that because I moved. Now, I’m back in a new house, with a new set of challenges. This time, it’s raccoons.


I made a small pond out of a barrel planter, or rather I attempted to start one. After a week, I woke up in the morning to see the pond was completely destroyed. The Java fern and Anubias I had just planted were on the deck in ribbons. Something dumped the pump into the water, chewed up the fountain, and made a huge mess. I’m assuming it’s raccoons since we see them around our trash, and in our backyard occasionally and they like water. Definitely not cats playing in the water, and the only other larger mammals near here are some possums and coyotes, neither of which make sense for this so I’m going with raccoons. Now, I don’t object to them playing in the water, I think that would be fun to see, but destroying the fountain and plants… I can’t have that. The easy and best prevention is to spray vinegar or some essential oils around, but that’s no fun. So an over-engineered solution it is.
I had a few challenges with this project:
- Making it waterproof – South San Francisco can get fairly damp with the fog
- Differentiating between raccoons and other similarly sized animals
- My last design used open-loop steppers, which meant over time the missed steps and lack of homing or absolute positioning caused the motor and camera cables get pulled out which is a big problem.
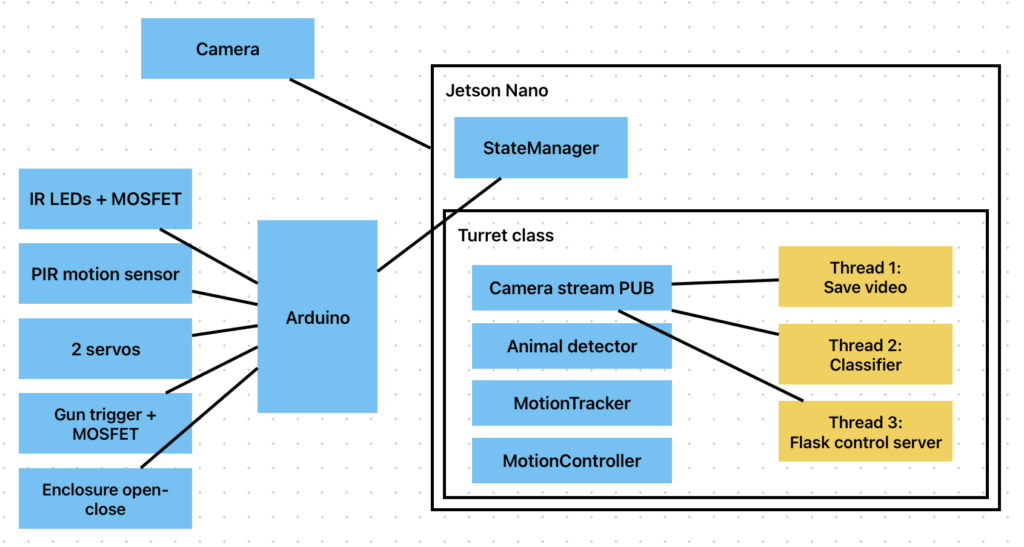
- I also wanted to be able to control the turret but also leave it unattended. This means it has to be able to detect motion, classify an animal, notify me, and display a control server with video and motion controls.
I initially wanted a game style controller that would use my iPhone’s tilt controls for aiming, with a video stream and a fire button. I also want the ability to switch between several modes:
- Auto-tracking and firing
- Auto-track with manual firing
- Manual tracking and firing
My initial plan was to have a website that would get the tilt from the iPhone and send it back to a server, but turns out that requires a full https cert for my server among other things, so that was nixed after some testing.
Software Architecture
Mechanical Design
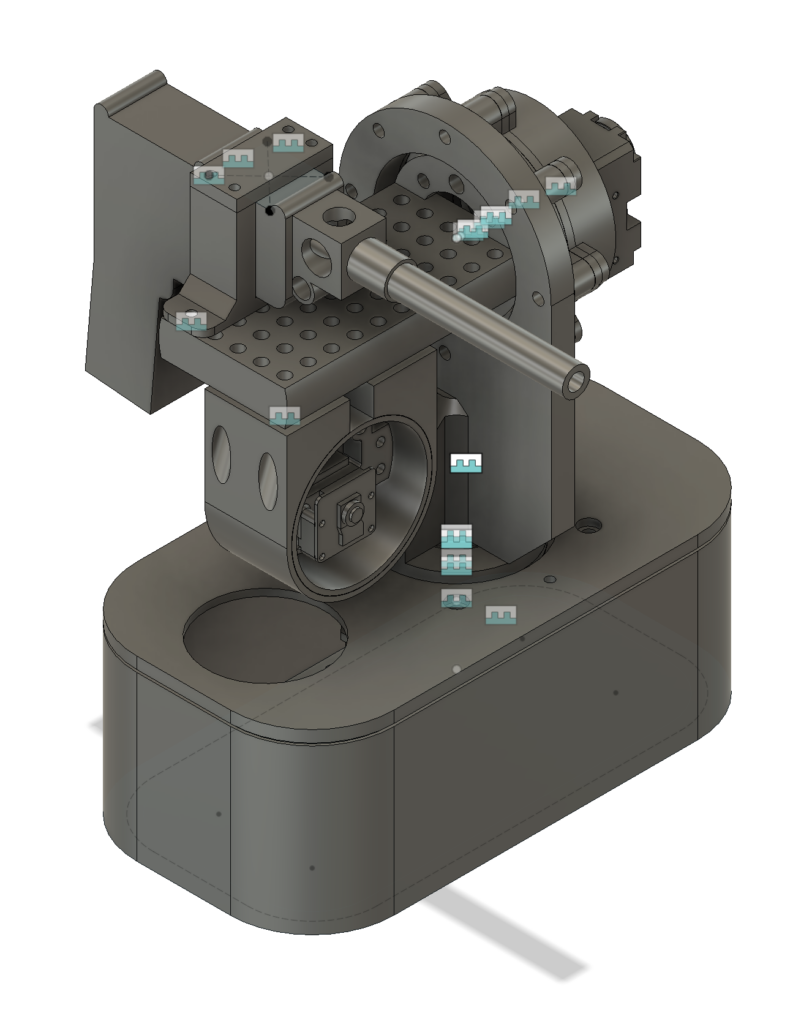

The turret design is 3D printed in PLA. A big challenge with the turret was the supporting bearings that the servos are mounted onto.
Due to issues with the camera cable being too fragile and exposed, I added a CSI-HDMI converter into the camera case.
I’m going to end the post here for now, right now I’m trying to get the Dynamical servos to work without a debug port and I’m also working on a method to shield the turret until it’s needed, but also opens silently.